「協働ロボット」は、作業者との協働作業を前提としたロボットです。作業者と同じ空間で動作するため、ロボット周辺の安全対策は重要ですが、過剰に制御するとチョコ停の原因になりかねません。一方、作業者を隔てる安全柵がないケースもあり、安全を確保するにはロボットの高度な制御が必要です。
安全対策のポイント
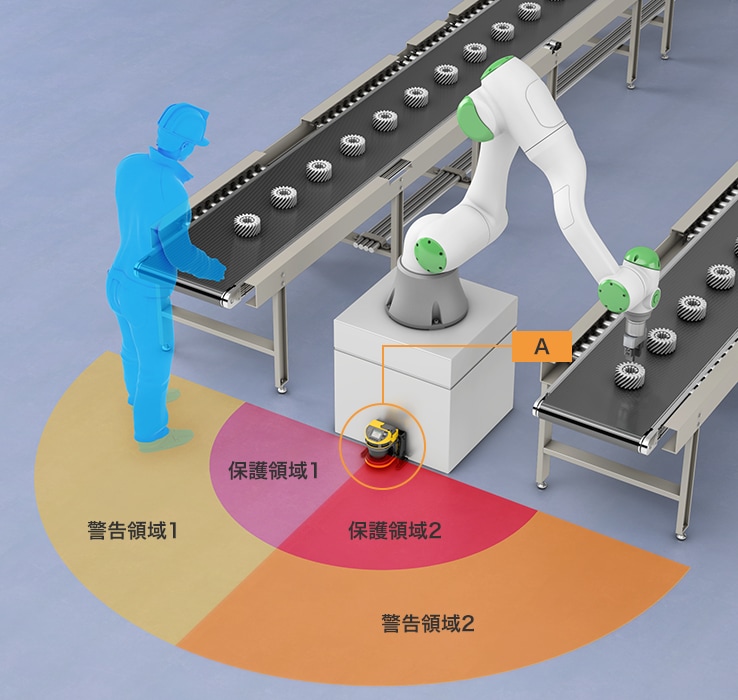
- 距離を測ってロボット制御
- 作業者がロボットに近づく(警告領域)→ロボットの速度を減速する。
- ロボットの可動範囲内に入る(保護領域)→ロボットが停止する。
※保護領域1、警告領域1に作業者がいる際にはロボットがその方向に移動しないように移動制限をかけます。
キーエンスからのご提案
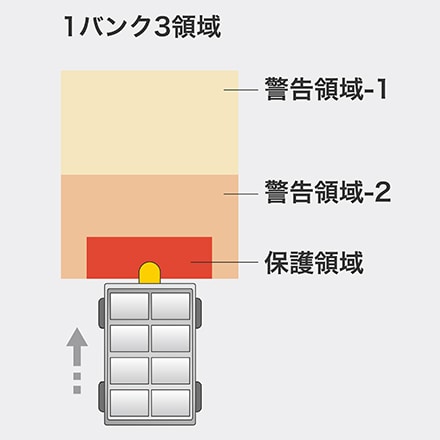
- 1バンク3領域を1台でカバー
- ロボットと作業者の距離は、セーフティレーザスキャナが検知します。
- セーフティレーザスキャナは、1バンク当たりに1つの保護領域とは別に2つの警告領域を設定することができ、それぞれに異なった制御を割り当てることができます。
- 活用のヒント
- セーフティレーザスキャナがロボットの動作速度を変化させたり動作を停止させたりする距離は、任意で設定することができます。作業者が警告領域に侵入した時点で警告灯を点灯させ、ロボットの不要な停止を防ぐなど、さまざまな安全機器と連携した安全対策が可能です。
最新の安全機器をカタログで詳しくご紹介します。
ダウンロードしてご確認ください。


- 事例を探す
- 侵入を検知する事例
- 存在を検知する事例
- 侵入と存在両方
を検知する事例
導入事例をまとめてダウンロード

安全対策をご検討の方必見!「機械安全」を実現する安全装置の導入事例を、"危険源への侵入の検知"と"危険区域の存在の検知"を中心に、わかりやすくご紹介します。
PDFで詳しく見る- 安全機器の商品一覧



