- 画像処理を学ぶ
- 理解度チェック
- 画像処理理解度テスト 1
- 画像処理理解度テスト 2
- 画像処理理解度テスト 3
- 画像処理システムの用途
- 業界別導入事例
- 選定のポイント
- 導入のメリット
寸法検査の基礎 寸法測定/エッジ検出
エッジ検出を用いた寸法検査が画像センサアプリケーションの最近のトレンドです。画像センサを使用した寸法検査では、対象物を2 次元で捕らえ、エッジを検出することで、位置や幅、角度を計測することができます。ここでは、エッジ検出の原理を処理プロセスに従って説明しています。原理を理解することで、検出を最適な状態に設定できるようになります。さらに、エッジを用いた代表的な検査例を紹介し、検出安定化のための前処理フィルタの選定方法を説明します。

エッジ検出の原理
エッジとは、画像内に生じる明るい部分と暗い部分の境界のことです。エッジ検出とは、この濃淡変化の境界を画像処理で検出することです。エッジは以下の4つのプロセスから求められます。
(1)投影処理を行なう
計測領域内の画像に投影処理をかけます。
投影処理とは、検出方向に対して垂直にスキャンを行ない、各投影ラインの平均濃度を求めることです。投影ラインの平均濃度波形を投影波形と呼びます。

投影処理とは?

投影方向の平均濃度を求めることです。
領域内のノイズ的な変化による誤検出を軽減します。
(2) 微分処理を行なう
投影波形をもとに微分処理を行ないます。
エッジとなりうる濃淡変化が大きい箇所は微分値が大きくなります。
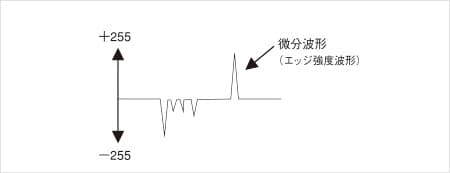
微分処理とは?
濃淡(階調)の変化量を求める処理です。
領域内の濃度絶対値変化の影響をキャンセルします。
例)濃淡変化のないところは0。
白色(255)→黒色(0)の変化の場合は−255。
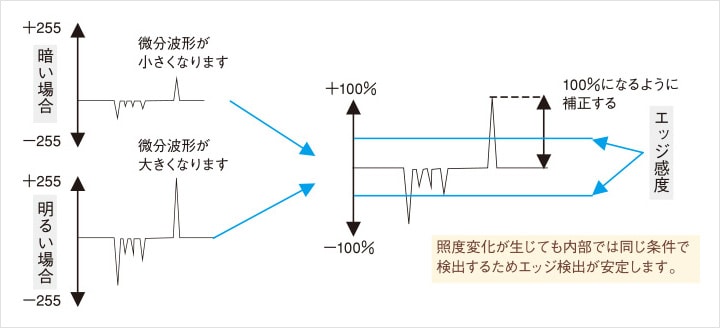
(3) 微分の最大値が100%になるように補正する
実ラインでのエッジを安定させるために、常に微分値絶対値の最大が100%になるように補正をかけます。
設定した「エッジ感度(%)」をこえた部分の微分波形のピーク点をエッジ位置として求めます。
濃淡の変化度のピーク点を検出する原理のため、照度変化の多い実ラインでも安定するエッジ検出が実現できます。
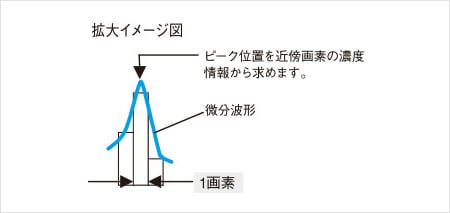
(4)サブピクセル処理を実行
微分波形の最大部分を中心とする近傍3画素に注目し、この3つの画素で形成される波形から補間演算を行ないます。
エッジ位置を1/100 画素単位まで計測します。(サブピクセル処理)


エッジ検出を用いた検査の代表例
エッジ検出は、次のような多数の派生モードがありますが、それらを使った代表例を紹介します。

<例1>エッジ位置による各種検査
エッジ位置モードを複数箇所設定し、対象物のX座標やY座標を計測しています。

<例2> エッジ幅モードによる各種検査
エッジ幅の「外寸」モードを使用し、金属プレートの幅計測、穴のX 方向/Y 方向の径などを計測しています。

<例3>エッジ位置円周領域による各種検査
計測領域を「円周」にし、切り欠きの角度(位相)を計測しています。

<例4> トレンドエッジ幅による各種検査
「円周」領域による「トレンドエッジ幅」モードを使用し、リングの内径をスキャンし、扁平度合いの評価を行なっています。

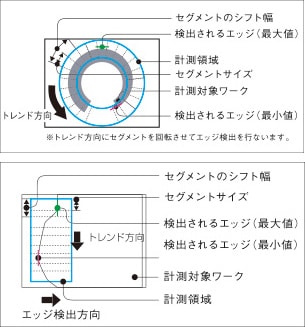
トレンドエッジモード
トレンドエッジ位置(幅)モードは、検査領域内を幅の狭いエッジウィンドウをスキャンしながら各点のエッジ位置を検出します。この検査モードにより、一つのウィンドウで多点のエッジ位置(幅)を検出できることから、対象ワークの微妙な変化を逃しません。

検出原理
幅の狭い領域セグメントを細かいピッチで移動しながら、各ポイントでのエッジ幅やエッジ位置を検出します。
- ・高精度な位置を検出するときは…セグメントサイズを小さくします。
- ・処理時間を短縮するときは…セグメントのシフト幅(=移動量)を小さくします。
- ・トレンド方向とは…セグメントを移動させる方向のことです。
エッジ検出を安定させるための前処理フィルタ
エッジ検出においては、エッジのばらつきをいかに抑えるかが鍵となります。
エッジ検出を安定させるために効果的なフィルタとしては、「メディアン」や「平均化」が良く知られています。これらの前処理フィルタの特徴と効果的な選定方法を説明します。
元画像

平均化

3×3画素の平均フィルタです。ノイズ成分の影響を少なくするために効果的なフィルタです。
メディアン

3×3画素の中央値フィルタです。画像をぼかすことなくノイズ成分の影響を少なくするためのフィルタです。
前処理フィルタをどのように最適化するか
一般的に「メディアン」や「平均化」がエッジ安定化につながるのですが、手元のワークにはどれが有効かということは、なかなか分かりません。ここでは、各フィルタを施した場合の計測値のばらつきを統計的に評価する手法を紹介します。
CV シリーズ(CV2000以降)には統計解析機能が搭載されています。これは、計測したデータを本体内に記録し、同時に統計解析までをも行なう機能です。
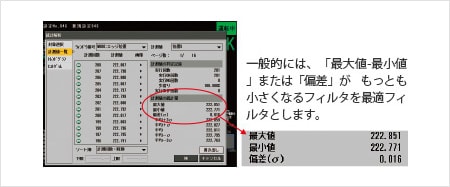
この機能を利用し、「フィルタなし」「メディアン」「平均化」「メディアン+平均化」「平均化+メディアン」を施して静止状態を繰り返し計測し、各々のデータの統計解析結果を確認すれば最適フィルタを選定することができます。
寸法測定/エッジ検出 まとめ
画像センサでエッジモードを有効に活用にするため、以下のポイントを覚えてください。
- 1.エッジの検出原理を踏まえると調整がスムーズにできます。
- 2.多数の派生モードを知ることで検出の可能性が格段に向上します。
- 3.代表的な検出例を参考にすることで、立上げがスムーズになります。
- 4.実験的に最適前処理フィルタを選定することでより速やかに検出を安定させることができます。
次のテーマは位置測定/サーチモードの原理と活用方法です。
組立工程での部品位置決めなどで使う他に、位置補正機能としても使うサーチモードの原理と活用方法を説明します。

