リンクの使用例
リンク機構は、電気製品内部の小さな部品や自動車のパワートレーンなどの強い負荷がかかる部品、さらに航空機の主脚まで、さまざまな箇所で利用されています。そして、それらの機能と安全性は、リンクと対偶(ジョイント)の複雑な動作で実現されています。
ここでは、航空機の脚柱構造を例に、リンクの動作を具体的に解析します。

航空機の脚柱構造
航空機の脚柱は、およそ以下のような構造になっています。
この構造では、リンクAとリンクCが一直線のとき、外力F1がかかることで必要な剛性が生まれます。

- A: リンクA
- B: リンクB
- C: リンクC
車輪の格納動作
離陸後の車輪格納時、脚柱は以下のように動作します。
- ①リンクAが時計回りする
- ・リンクAの動作に伴って、リンクCとリンクBが動きます。
- ②リンクAとリンクCが重なる
- ・この時点でリンクBは死点*になり、車輪が格納されます。
- 死点
- リンク同士が一直線になり、リンクが拘束されないときの対偶(ジョイント)。「思案点」または「デッドポイント」ともいわれる。

- A: リンクA
- B: リンクB
- C: リンクC
車輪の展開動作
着陸の前など、車輪を展開する場合、脚柱は以下のように動作します。
- ①リンクAとリンクCが重なった状態で回転する
- ・このとき、リンクBが角度αの間、停止します。
- ②リンクBが角度αを超える
- ・リンクBは下降していきます。
- ③車輪が着陸可能状態になる
- ・リンクAとCが一直線になり、着陸が可能な(元の)状態になります。

- A: リンクA
- B: リンクB
- C: リンクC

ステアリング機構とリンク(アッカーマン・ジャントー理論)
自動車のハンドル操作による前輪の切れ角を、常に内輪側が外輪側より大きくし、すべての車輪の旋回の中心が同じ点になるようにすることを「アッカーマン・ジャントー理論」といいます。この方式では、タイヤに負担がかからないスムーズな旋回が可能になり、この方式を用いたステアリング機構を「アッカーマン式ステアリング」といいます。
一方、ハンドル操作に対し前輪を内輪・外輪とも同じ切れ角にするステアリングを「パラレルステアリング」といいます。


- T:トレッド幅
- L:ホイールベース
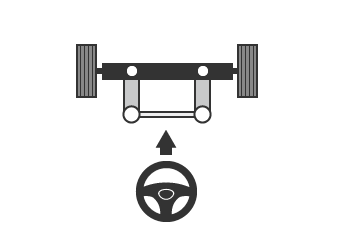
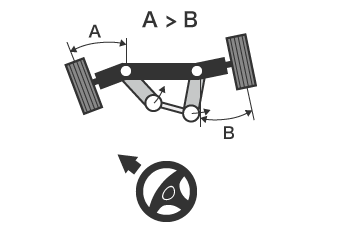
アッカーマン式ステアリングのリンク機構
コーナーを曲がる際、通常の4節リンクによるステアリング機構(パラレルステアリング機構)では前輪の内側と外側のタイヤにスリップ角が生じてタイヤに負担がかかります。しかし、アッカーマン式ステアリングでは、コーナーの内側になる車輪に大きな角度が付くため、左右の前輪が同じ中心を持つ円を描きます。この機構を持つステアリングのスムーズなコーナリングは、アッカーマン・ジャントー理論によって実現しています。
車速が上がって遠心力が発生すると、車両の旋回中心はリアアクスル(後輪軸)より前方に移動するため、このステアリング機構のメリットは、遠心力を無視できる速度での走行時に限られます。


パラレルステアリングのリンク機構
F-1などで使用されるレーシングカーは、超高速での限界走行のみなので内輪荷重がほとんどありません。このため、アッカーマン・ジャントー理論によるメリットがなく、通常の4節リンクの構造を持ち、左右の前輪が同じ角度で切れる「パラレルステアリング機構」を用いています。
パラレルステアリングのリンク機構はタイヤが車体に干渉しにくいため、左右の舵角を大きくとれます。このため小回りが利くというメリットがあります。また、タイヤに横滑りが発生するため、ハンドルが軽くなるという効果もあります。
多くの車は、アッカーマン・ジャントー式ステアリングとパラレルステアリングの双方の利点を活かし、その中間的な特性に設定されています。