
TOFセンサの原理と用途事例
TOFは、Time of Flight(飛行時間)の略で、文字通り光の飛行時間を用いる方式です。TOF方式の反射型レーザセンサは、パルス投光したレーザー光が対象物表面で反射して返ってくるまでの時間を基に距離を測定することができます。ここではその原理やメリット、用途事例について解説します。

TOFセンサの原理
- TOF方式 反射型レーザセンサの例
-
基準距離のとき 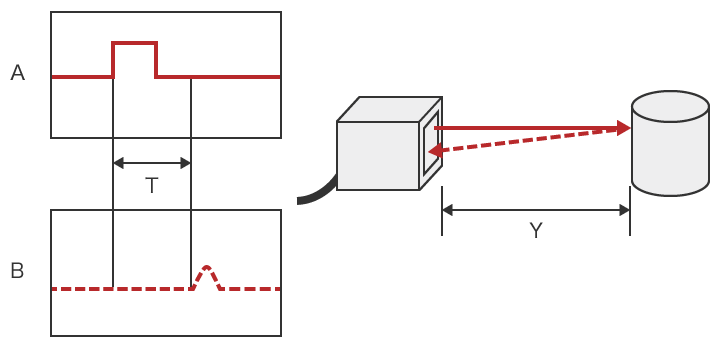
- A
- 投光パルス
- B
- 受光パルス
- T
- 時間差
- Y
- 検出体までの距離
TOF方式では図のように、パルス投光したレーザー光が対象物表面で反射して受光するまでの時間(=投光パルスと受光パルスの遅れ時間)を「T」とし、光の速さ「C(=約30万km/秒)」と掛けることで、センサと対象物の往復距離(2Y)を求めることができます。その算出イメージを下記に示します。
2Y(往復距離)=C(光の速さ)×T(反射光を受光するまでの時間)
センサと対象物の片道分の距離「Y」は、この式で得られる往復距離の1/2ということになります。
たとえば、投光パルスと受光パルスの遅れ時間が20ナノ秒だった場合、
20ナノ(0.00000002)秒×約30万km=往復距離約6m (0.006km)
つまり、センサから対象物までの片道距離は、約6m÷2=約3mであることがわかります。
TOFセンサのメリット
- 設置の自由度が高い
- 長距離検出が可能なため、ワークから離れた場所にセンサを設置することができます。それにより、作業者の動線やロボットの軌道を妨げることなく自由度の高い設置が可能です。また、広いスペースで複数台設置することにより、自動車の車体へのアッセンブル時やロール基材のセット時などに大型ワークを多方向から位置決めすることができます。
- さまざまな距離・表面状態・設置条件に対応
- キーエンスのTOFレーザセンサは、0.06~5mのワイドレンジ検出に加え、専用カスタムICは約8GHzの高速サンプリングによる大量のデータを平均化処理します。それにより、受光量が不足しがちな対象物の色・素材や設置条件でも安定検出が可能です。

TOFセンサの用途事例
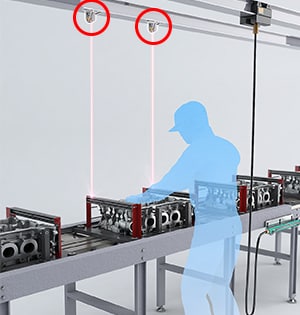
作業者の動線外からの検出
最大検出距離が5mと長いため、作業者の邪魔にならない場所にセンサを設置することができます。作業者や工具が、センサやケーブルに接触することで発生する「光軸ズレ」や「ケーブルの断線」などによるラインの停止といった重大なトラブルを回避することができるほか、作業性の向上にも貢献します。
Before

After
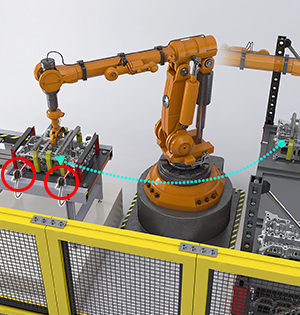
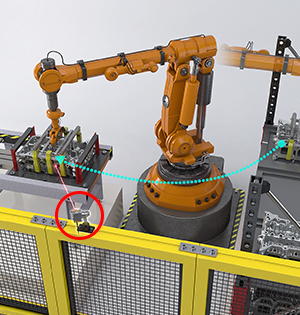
ロボットの動作軌跡外からの検出
6軸産業用ロボットのアームの動作は広範囲で、チャック姿勢(ワーク搬入出姿勢)に不具合があると、予期しない軌道を描く場合があります。このような場合、アームの動作範囲外にセンサを設置すると、アームやワークがセンサに接触することを回避できます。また、加工位置から遠い場所に設置することで、加工油や薬品の飛散によるレンズの汚れや、それの汚れによる誤検出を防ぐことができます。
Before
After
まとめ
TOF方式の反射型レーザセンサの特徴とメリットをまとめると以下の通りです。
- ・投光したレーザー光が返ってくるまでの時間を基に、対象物までの距離を測定するレーザセンサ
- ・わずかな隙間からの長距離検出が可能
- ・対象物に合わせてスポットサイズを変えることができるため、受光量が不足するような対象物の色・素材・設置条件でも安定検出できる
センサにはこのほかにもさまざまな種類があり、それらの特徴を知って正しく選定することが大切です。
本章に記載した内容や、他の章でも紹介しているセンサの特徴を1冊にまとめた資料は、下記よりダウンロードしていただけます。ラインナップカタログと併せてご覧ください。




